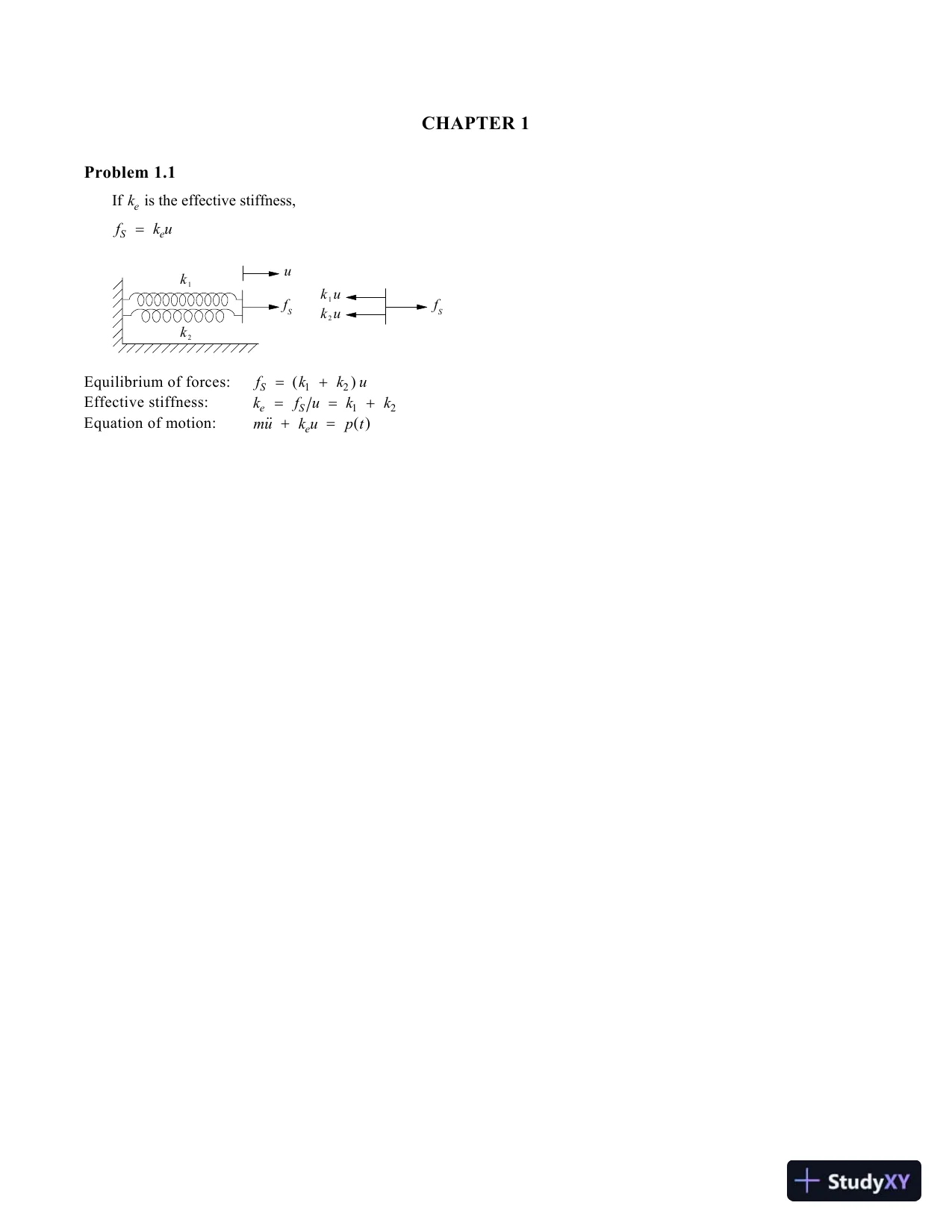
 CHAPTER 1Problem 1.1Ifkeis the effective stiffness,fkuSe=fSfSk u2k u1k1k2uEquilibrium of forces:fkkuS=+()12Effective stiffness:kfukkeS==+12Equation of motion:muk up te&&( )+=
CHAPTER 1Problem 1.1Ifkeis the effective stiffness,fkuSe=fSfSk u2k u1k1k2uEquilibrium of forces:fkkuS=+()12Effective stiffness:kfukkeS==+12Equation of motion:muk up te&&( )+=Preview Mode
This document has 549 pages. Sign in to access the full document!