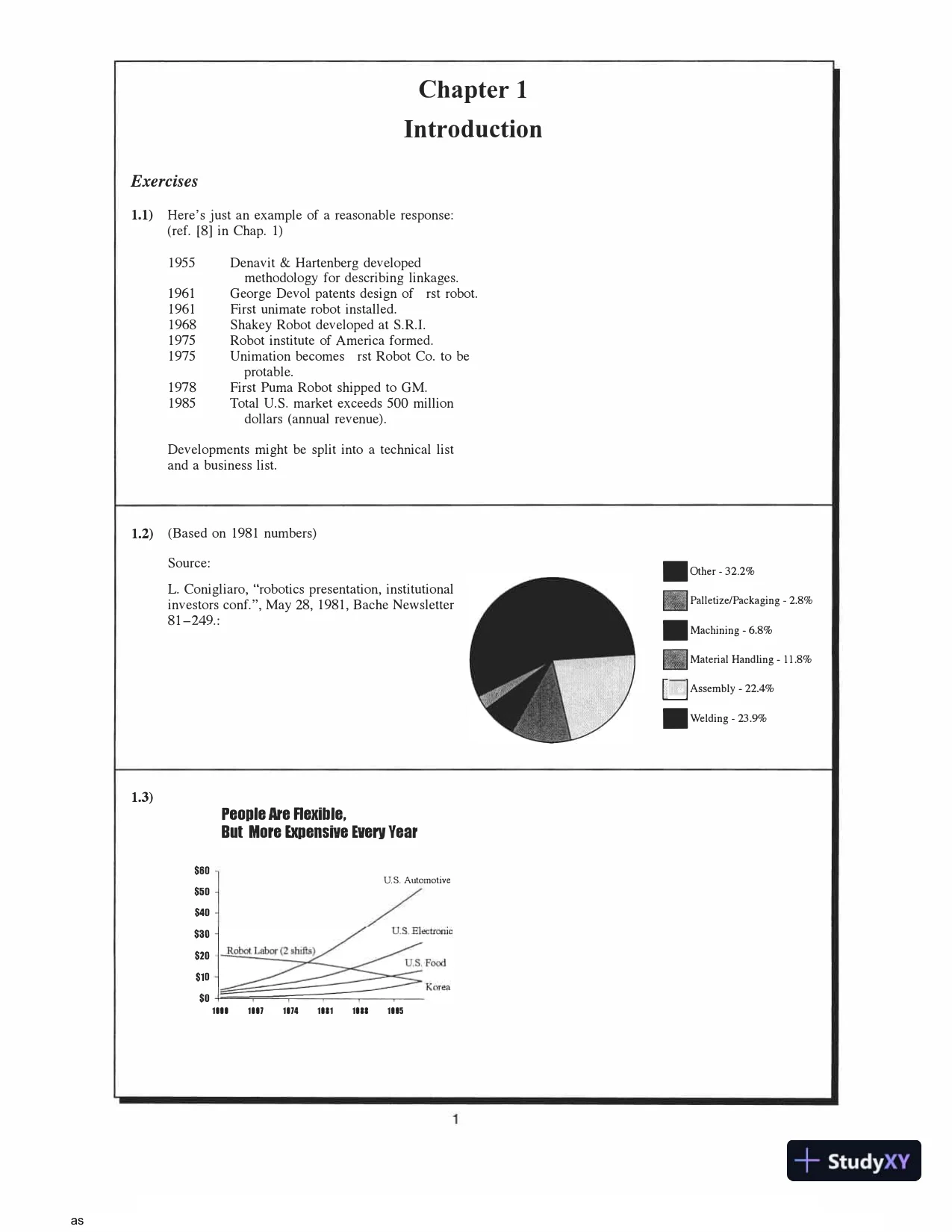
 Chapter 1IntroductionExercises1.1)Here's just an example of a reasonable response:(ref. [8] in Chap. 1)1955Denavit & Hartenberg developedmethodology for describing linkages.I961George Devol patents design ofrst robot.1961First unimate robot installed.1968Shakey Robot developed at S.R.I.1975Robot institute of America formed.1975Unimation becomesrst Robot Co. to beprotable.1978First Puma Robot shipped to GM.1985Total U.S. market exceeds 500 milliondollars (annual revenue).Developments might be split into a technical listand a business list.1.2)(Based on 1981 numbers)Source:L. Conigliaro, "robotics presentation, institutionalinvestors conf.", May 28, 1981, Bache Newsletter81-249.:• Other - 32.2%• Palletize/Packaging - 2.8%• Machining - 6.8%• Material Handling - 11.8%[ '|Assembly - 22.4%• Welding - 23.9%1.3)$60$50$40$30$20$10$0People Are FIeXible,But More Expensive Every Year1999199719741981U.S. Automotive19881995
Chapter 1IntroductionExercises1.1)Here's just an example of a reasonable response:(ref. [8] in Chap. 1)1955Denavit & Hartenberg developedmethodology for describing linkages.I961George Devol patents design ofrst robot.1961First unimate robot installed.1968Shakey Robot developed at S.R.I.1975Robot institute of America formed.1975Unimation becomesrst Robot Co. to beprotable.1978First Puma Robot shipped to GM.1985Total U.S. market exceeds 500 milliondollars (annual revenue).Developments might be split into a technical listand a business list.1.2)(Based on 1981 numbers)Source:L. Conigliaro, "robotics presentation, institutionalinvestors conf.", May 28, 1981, Bache Newsletter81-249.:• Other - 32.2%• Palletize/Packaging - 2.8%• Machining - 6.8%• Material Handling - 11.8%[ '|Assembly - 22.4%• Welding - 23.9%1.3)$60$50$40$30$20$10$0People Are FIeXible,But More Expensive Every Year1999199719741981U.S. Automotive19881995Preview Mode
This document has 183 pages. Sign in to access the full document!