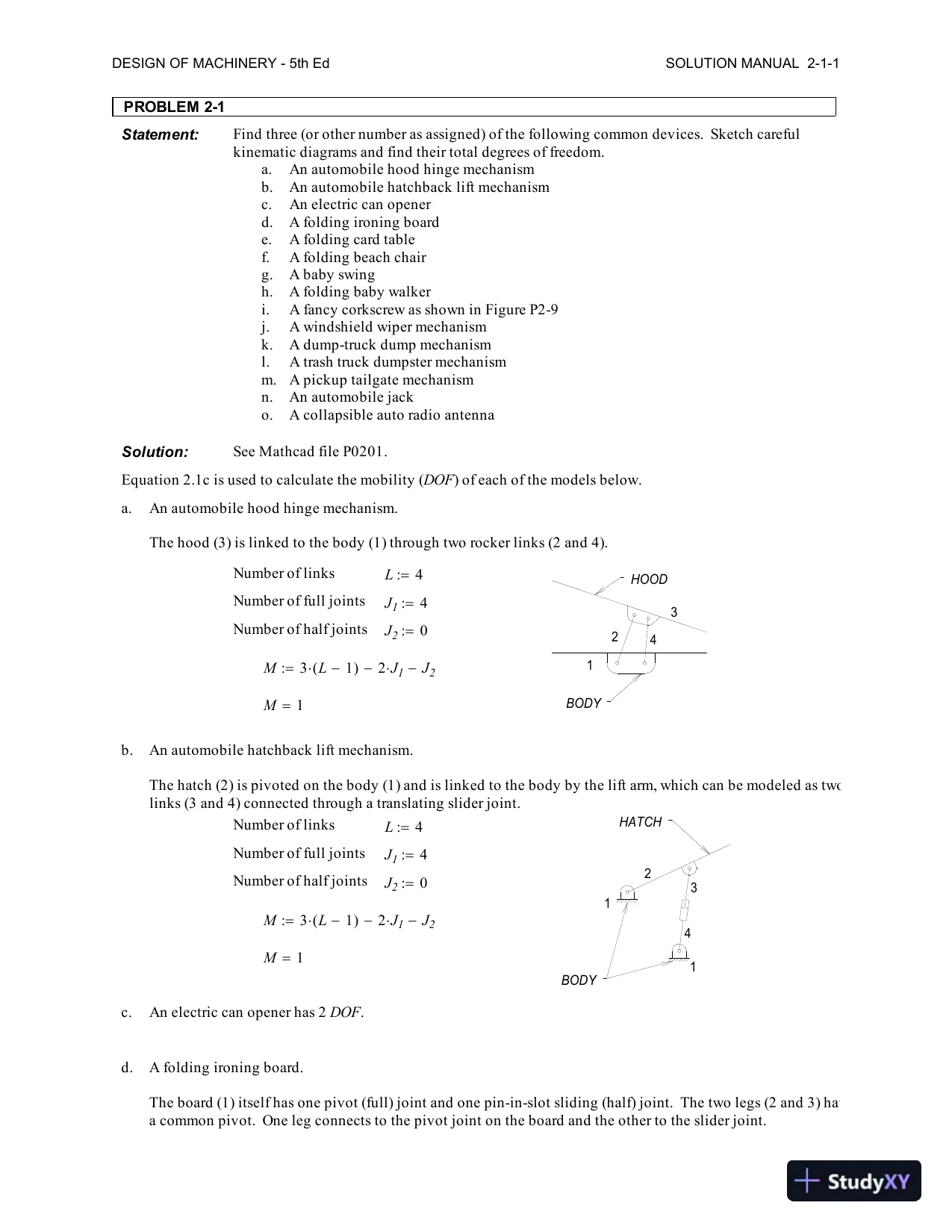
 DESIGN OF MACHINERY - 5th EdSOLUTION MANUAL 2-1-1PROBLEM 2-1Statement:Find three (or other number as assigned) of the following common devices. Sketch carefulkinematic diagrams and find their total degrees of freedom.a.An automobile hood hinge mechanismb.An automobile hatchback lift mechanismc.An electric can openerd.A folding ironing boarde.A folding card tablef.A folding beach chairg.A baby swingh.A folding baby walkeri.A fancy corkscrew as shown in Figure P2-9j.A windshield wiper mechanismk.A dump-truck dump mechanisml.A trash truck dumpster mechanismm.A pickup tailgate mechanismn.An automobile jacko.A collapsible auto radio antennaSolution:See Mathcad file P0201.Equation 2.1c is used to calculate the mobility (DOF) of each of the models below.a.An automobile hood hinge mechanism.The hood (3) is linked to the body (1) through two rocker links (2 and 4).3BODY124HOODNumber of linksL4Number of full jointsJ14Number of half jointsJ20M3L1()2J1J2M1b.An automobile hatchback lift mechanism.The hatch (2) is pivoted on the body (1) and is linked to the body by the lift arm, which can be modeled as twolinks (3 and 4) connected through a translating slider joint.2BODY1143HATCHNumber of linksL4Number of full jointsJ14Number of half jointsJ20M3L1()2J1J2M1c.An electric can opener has 2DOF.d.A folding ironing board.The board (1) itself has one pivot (full) joint and one pin-in-slot sliding (half) joint. The two legs (2 and 3) hava common pivot. One leg connects to the pivot joint on the board and the other to the slider joint.
DESIGN OF MACHINERY - 5th EdSOLUTION MANUAL 2-1-1PROBLEM 2-1Statement:Find three (or other number as assigned) of the following common devices. Sketch carefulkinematic diagrams and find their total degrees of freedom.a.An automobile hood hinge mechanismb.An automobile hatchback lift mechanismc.An electric can openerd.A folding ironing boarde.A folding card tablef.A folding beach chairg.A baby swingh.A folding baby walkeri.A fancy corkscrew as shown in Figure P2-9j.A windshield wiper mechanismk.A dump-truck dump mechanisml.A trash truck dumpster mechanismm.A pickup tailgate mechanismn.An automobile jacko.A collapsible auto radio antennaSolution:See Mathcad file P0201.Equation 2.1c is used to calculate the mobility (DOF) of each of the models below.a.An automobile hood hinge mechanism.The hood (3) is linked to the body (1) through two rocker links (2 and 4).3BODY124HOODNumber of linksL4Number of full jointsJ14Number of half jointsJ20M3L1()2J1J2M1b.An automobile hatchback lift mechanism.The hatch (2) is pivoted on the body (1) and is linked to the body by the lift arm, which can be modeled as twolinks (3 and 4) connected through a translating slider joint.2BODY1143HATCHNumber of linksL4Number of full jointsJ14Number of half jointsJ20M3L1()2J1J2M1c.An electric can opener has 2DOF.d.A folding ironing board.The board (1) itself has one pivot (full) joint and one pin-in-slot sliding (half) joint. The two legs (2 and 3) hava common pivot. One leg connects to the pivot joint on the board and the other to the slider joint.Preview Mode
This document has 1903 pages. Sign in to access the full document!