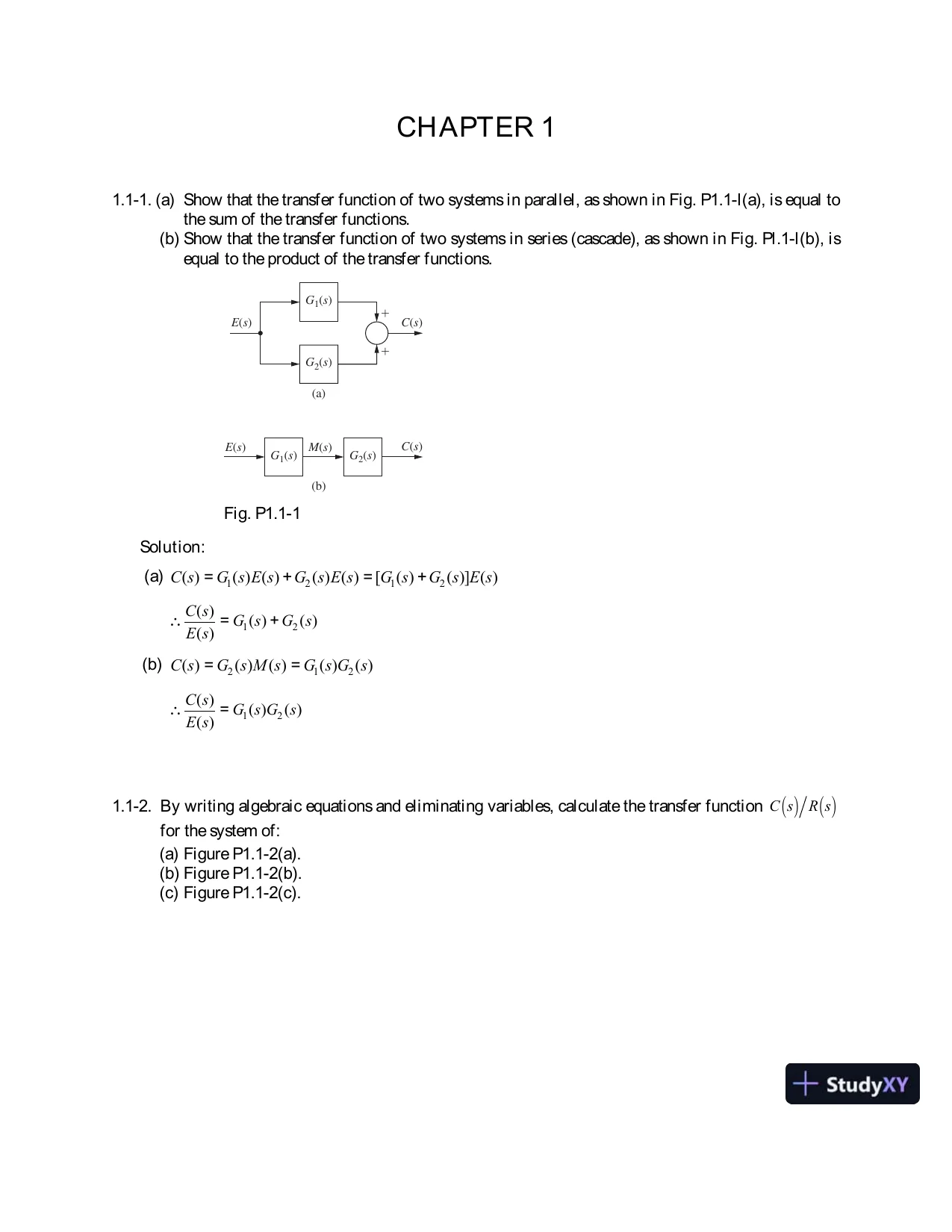
 CHAPTER 11.1-1.(a) Show that the transfer function of two systems in parallel, as shown in Fig. P1.1-l(a), is equal tothe sum of the transfer functions.(b) Show that the transfer function of two systems in series (cascade), as shown in Fig. Pl.1-l(b), isequal to the product of the transfer functions.G1(s)E(s)C(s)G1(s)G2(s)(a)(b)E(s)M(s)G2(s)C(s)++Fig. P1.1-1Solution:(a)1212( )( )( )( )( )[( )( )]( )C sG s E sGs E sG sGsE s=+=+12( )( )( )( )C sGsGsE s∴=+(b)212( )( )( )( )( )C sGs M sGs Gs==12( )( )( )( )∴=C sGs GsE s1.1-2.By writing algebraic equations and eliminating variables, calculate the transfer functionC s( )R s( )for the system of:(a) Figure P1.1-2(a).(b) Figure P1.1-2(b).(c) Figure P1.1-2(c).
CHAPTER 11.1-1.(a) Show that the transfer function of two systems in parallel, as shown in Fig. P1.1-l(a), is equal tothe sum of the transfer functions.(b) Show that the transfer function of two systems in series (cascade), as shown in Fig. Pl.1-l(b), isequal to the product of the transfer functions.G1(s)E(s)C(s)G1(s)G2(s)(a)(b)E(s)M(s)G2(s)C(s)++Fig. P1.1-1Solution:(a)1212( )( )( )( )( )[( )( )]( )C sG s E sGs E sG sGsE s=+=+12( )( )( )( )C sGsGsE s∴=+(b)212( )( )( )( )( )C sGs M sGs Gs==12( )( )( )( )∴=C sGs GsE s1.1-2.By writing algebraic equations and eliminating variables, calculate the transfer functionC s( )R s( )for the system of:(a) Figure P1.1-2(a).(b) Figure P1.1-2(b).(c) Figure P1.1-2(c).Preview Mode
This document has 279 pages. Sign in to access the full document!