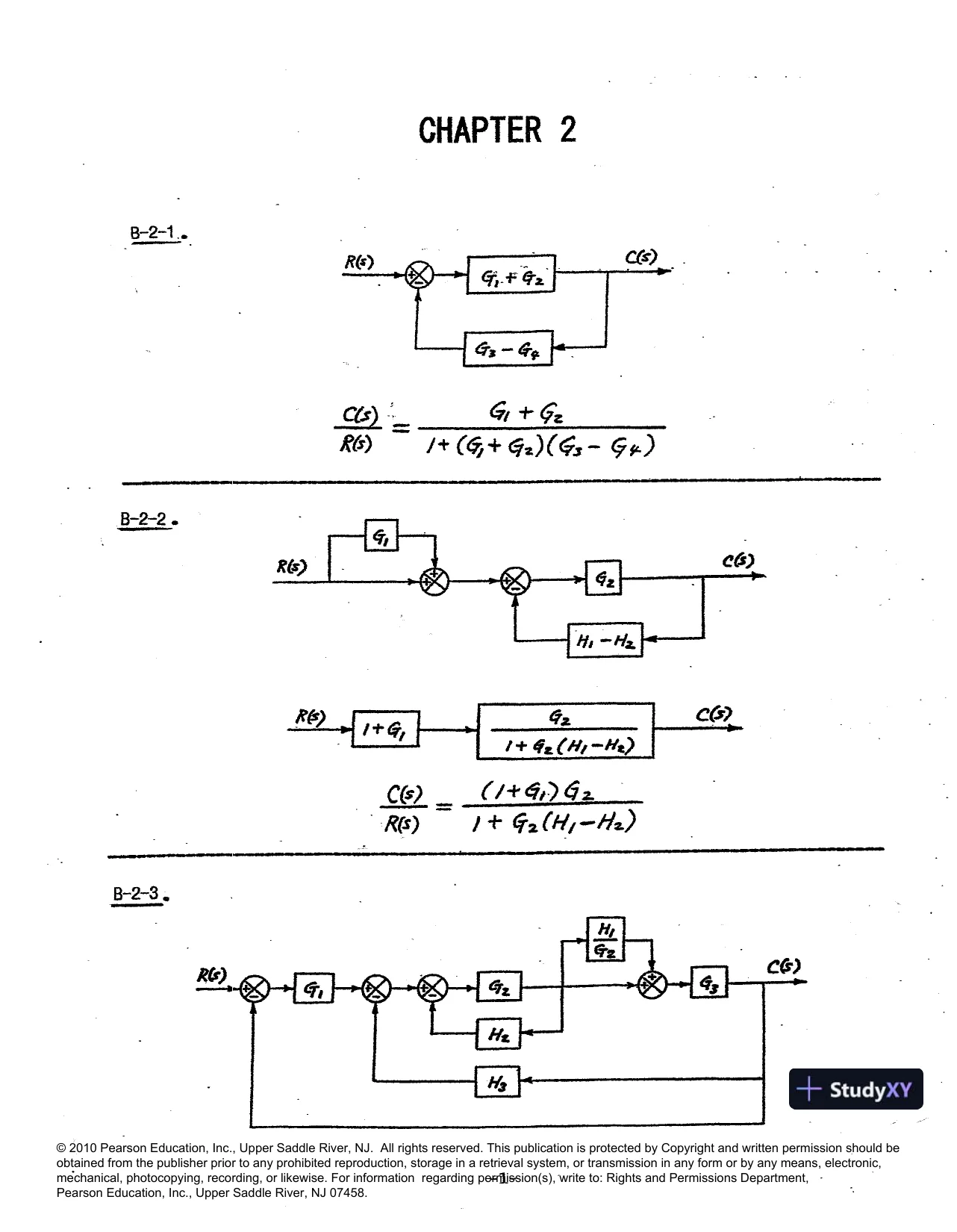
 B-2-1..:.RG)—[Zo’0<):-B.-B.paa8GFG2.cs)G+6:RE)/t(G+G2)(Gs~Ge):CS—B-2-2.:e6)re62)6)[¢.].a7—RE[-a6)-+6,———en:14Go(Hy—He)C6)__(/+G06G-.RS)1+GulH=e)-ISE——————————.B-2-3..}’Co2%)<=![622=&=x):[]EE:Ld1StudyXY©2010PearsonEducation,Inc.,UpperSaddleRiver,NJ.Allrightsreserved.ThispublicationisprotectedbyCopyrightandwrittenpermissionshouldbeobtainedfromthepublisherpriortoanyprohibitedreproduction,storageinaretrievalsystem,ortransmissioninanyformorbyanymeans,electronic,mechanical,photocopying,recording,orlikewise.Forinformationregardingpeslission(s),writeto:RightsandPermissionsDepartment,-PearsonEducation,Inc.,UpperSaddleRiver,NJ07458.-
B-2-1..:.RG)—[Zo’0<):-B.-B.paa8GFG2.cs)G+6:RE)/t(G+G2)(Gs~Ge):CS—B-2-2.:e6)re62)6)[¢.].a7—RE[-a6)-+6,———en:14Go(Hy—He)C6)__(/+G06G-.RS)1+GulH=e)-ISE——————————.B-2-3..}’Co2%)<=![622=&=x):[]EE:Ld1StudyXY©2010PearsonEducation,Inc.,UpperSaddleRiver,NJ.Allrightsreserved.ThispublicationisprotectedbyCopyrightandwrittenpermissionshouldbeobtainedfromthepublisherpriortoanyprohibitedreproduction,storageinaretrievalsystem,ortransmissioninanyformorbyanymeans,electronic,mechanical,photocopying,recording,orlikewise.Forinformationregardingpeslission(s),writeto:RightsandPermissionsDepartment,-PearsonEducation,Inc.,UpperSaddleRiver,NJ07458.-Preview Mode
This document has 237 pages. Sign in to access the full document!