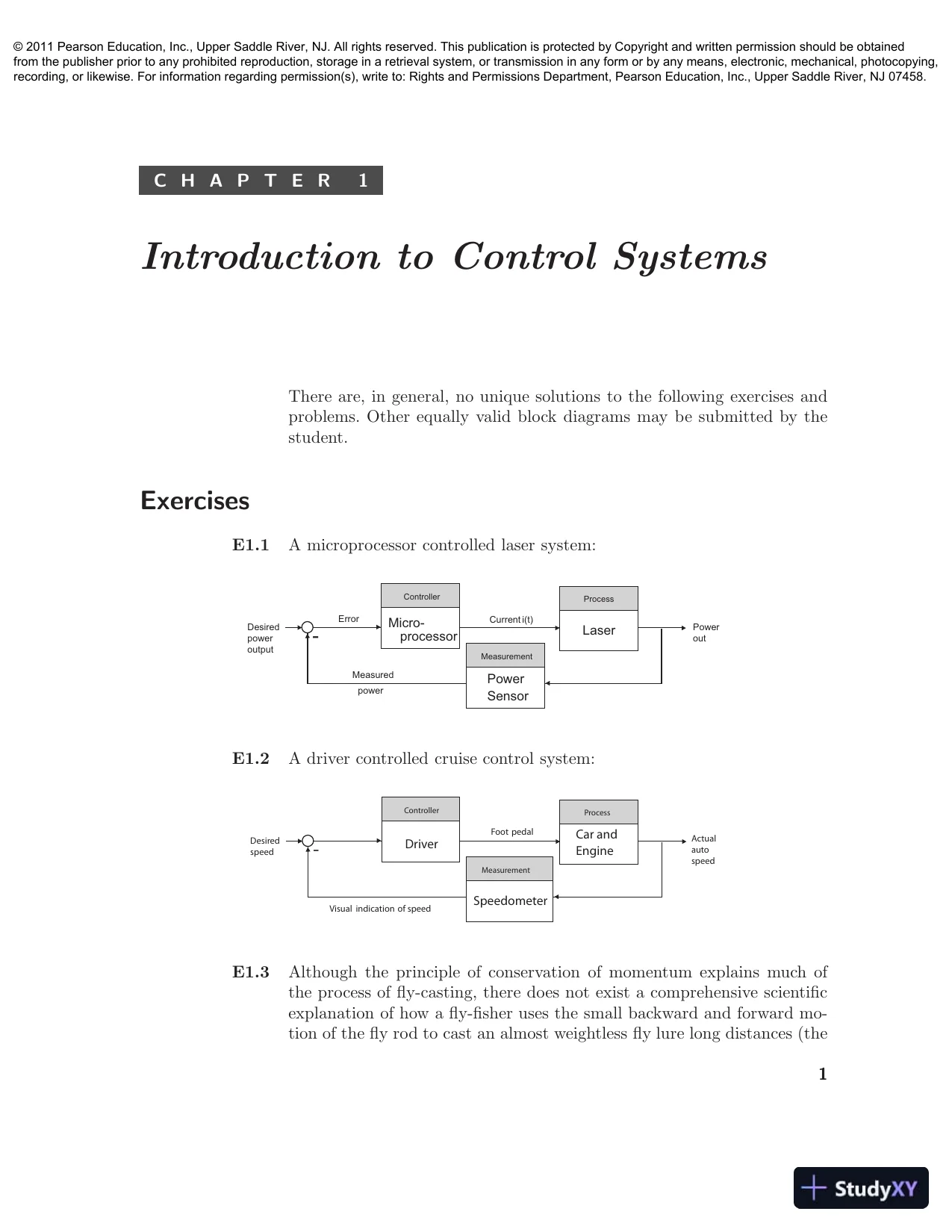
 CHAPTER1Introduction to Control SystemsThere are, in general, no unique solutions to the following exercises andproblems. Other equally valid block diagrams may be submitted by thestudent.ExercisesE1.1A microprocessor controlled laser system:ControllerErrorCurrent i(t)PoweroutDesiredpoweroutputMeasuredpower-LaserProcessprocessorMicro-PowerSensorMeasurementE1.2A driver controlled cruise control system:DesiredspeedFoot pedalActualautospeedVisual indicationof speedController-ProcessMeasurementDriverCar andEngineSpeedometerE1.3Although the principle of conservation of momentum explains much ofthe process of fly-casting, there does not exist a comprehensive scientificexplanation of how a fly-fisher uses the small backward and forward mo-tion of the fly rod to cast an almost weightless fly lure long distances (the1
CHAPTER1Introduction to Control SystemsThere are, in general, no unique solutions to the following exercises andproblems. Other equally valid block diagrams may be submitted by thestudent.ExercisesE1.1A microprocessor controlled laser system:ControllerErrorCurrent i(t)PoweroutDesiredpoweroutputMeasuredpower-LaserProcessprocessorMicro-PowerSensorMeasurementE1.2A driver controlled cruise control system:DesiredspeedFoot pedalActualautospeedVisual indicationof speedController-ProcessMeasurementDriverCar andEngineSpeedometerE1.3Although the principle of conservation of momentum explains much ofthe process of fly-casting, there does not exist a comprehensive scientificexplanation of how a fly-fisher uses the small backward and forward mo-tion of the fly rod to cast an almost weightless fly lure long distances (the1Preview Mode
This document has 749 pages. Sign in to access the full document!